Célébrons la Journée mondiale des drones le 6 mai
La recherche et l'innovation sur les drones

François Marcoux, étudiant à la maîtrise en génie électrique, Pr François Grondin, Pr David Rancourt, John Bass, étudiant au doctorat en génie mécanique, Jessy Verrette, étudiant à la maîtrise en génie mécanique, Maxime Doguet étudiant au doctorat en génie mécanique, Marc-Antoine Leclerc, étudiant au doctorat en génie mécanique, Pr Alexis Lussier Desbiens
Photo : Michel Caron - UdeS
À l’occasion de la Journée mondiale des drones, le 3IT présente un survol de quelques récents projets de recherche et d'innovation avec cette technologie.
François Grondin, Alexis Lussier Desbiens et David Rancourt sont tous les trois professeurs à la Faculté de génie. Alors que le Pr Grondin fait partie du Laboratoire de robotique intelligente, interactive, intégrée, interdisciplinaire, les professeurs Lussier Desbiens et Rancourt sont rattachés au regroupement Createk.
Pour mener leurs recherches de haut niveau, ils ont accès à des ressources spécialisées et à toute une infrastructure technologique qui permet la chaîne complète d'innovation : de la conception du prototype jusqu'à l'expérimentation et au test de vols qui peuvent être faits à l'extérieur du 3IT.
Cette technologie en plein essor est de plus en plus utilisée pour répondre à différents enjeux, notamment dans le domaine de l'environnement, la défense et la sécurité. Chaque année, nos étudiantes et étudiants à la maîtrise et au doctorat ont la chance de mener des projets avec des partenaires industriels. Cette formation pratique axée sur les réels besoins de l'industrie les plonge dans l'univers de la recherche et l'innovation et leur donne une longueur d'avance sur le marché du travail.
Professeurs David Rancourt, François Grondin et Alexis Lussier Desbiens
Afin d'illustrer l'étendue de la recherche avec des drones, voici quelques exemples de projets réalisés récemment au 3IT.
Détection de drones par le son

Photo : Fournie
Les centres correctionnels du Québec doivent lutter sans cesse contre l’intrusion et la livraison de marchandise par drone. Une solution potentielle? Un système acoustique de suivi et de détection du moment de largage pour la surveillance de drones de livraison.
On estime à trois le nombre d’intrusions par jour dans les centres correctionnels du Québec.
Parmi les systèmes de suivi existants, aucun ne permet de détecter fidèlement le moment où le drone livre sa marchandise. « Le but du projet est de concevoir un système capable de suivre et de détecter le moment de largage d’une masse fixée à un drone en vol en utilisant seulement des microphones, explique François Marcoux, étudiant à la maîtrise en génie électrique. L'identification précise de l’endroit de livraison du paquet faciliterait l’intervention humaine et pourrait empêcher la livraison complète de la marchandise. »
Atterrissage de drone en conditions extrêmes
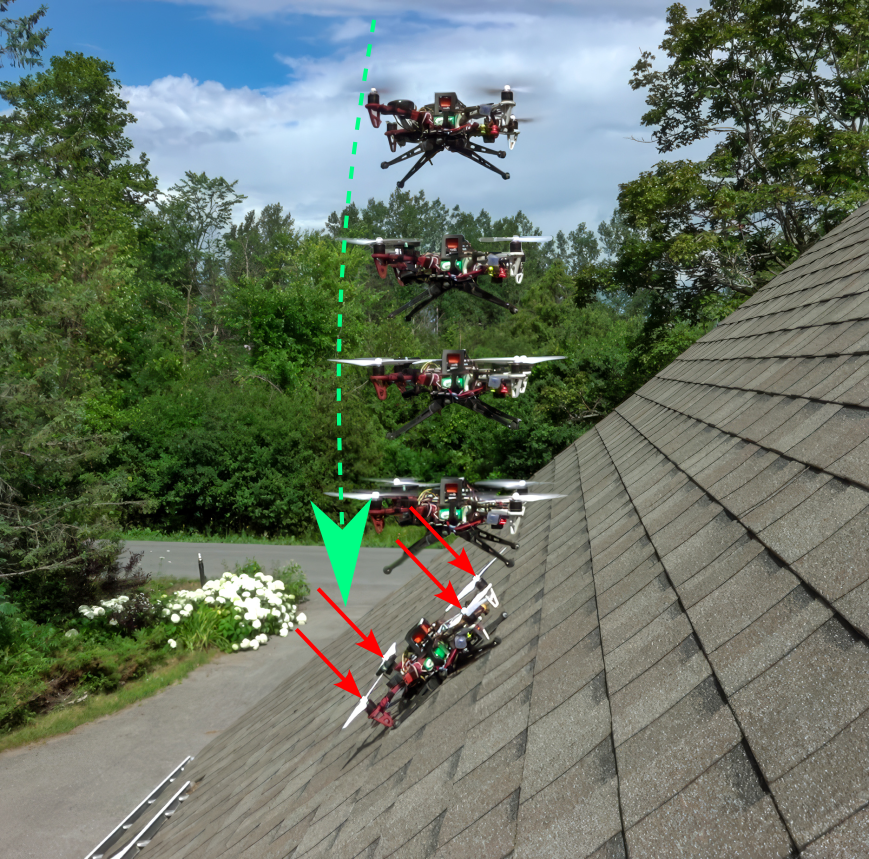
Photo : Fournie
Les multirotors conventionnels possèdent des limitations quant aux conditions dans lesquelles ils peuvent atterrir. La zone d'atterrissage doit être immobile et horizontale, et la vitesse d'impact doit être basse pour ne pas risquer d’endommager les composantes des multirotors.
L’amélioration des performances d’atterrissage des multirotors pourrait élargir l'utilisation des drones dans différents domaines. « Pour atterrir dans des conditions extrêmes, l'utilisation d'une combinaison d'amortisseurs à friction et de poussée inverse a été étudiée pour augmenter l'enveloppe d'atterrissage d'un facteur de plus de huit par rapport à celle d'un multirotors normal », explique John Bass, étudiant au doctorat en génie mécanique.
La stratégie proposée permet aux multirotors d'atterrir sur des toits inclinés jusqu’à 60 degrés et sur des véhicules en mouvement.
L'augmentation de l'enveloppe d'atterrissage permet aux multirotors d'être plus robustes aux perturbations externes, telles que le vent, les erreurs de capteurs et les mouvements imprévisibles des véhicules. Cela diminue également la complexité du contrôle requis pour effectuer un atterrissage sécuritaire.
Consulter l'article scientifique paru dans IEEEXplore
Voir l'article et la vidéo diffusés dans IEEE Spectrum
Inspection de lignes électriques haut voltage

Photo : Fournie
Au Québec, l’électricité produite par les barrages hydroélectriques parcourt près de 34 000 km de lignes. La maintenance de ce réseau étendu requiert l'inspection en contact des conducteurs, ce qui peut être fait avec un LineDrone, un drone récemment développé pour atterrir sur les conducteurs.

Photo : Fournie
Cependant, cette tâche s'avère ardue, même pour un pilote professionnel. « Le projet Nadile vise à automatiser l’atterrissage sur les conducteurs à haute tension pour faciliter son opération et permettre d’atterrir sur des endroits difficiles d’accès, en plus d'améliorer les capacités d'atterrissage du drone par temps venteux », explique David-Alexandre Poissant, étudiant à la maîtrise en génie mécanique. À ce jour, des missions d'inspection automatisées réussies ont été réalisées, comprenant un système d'atterrissage autonome sur les conducteurs, une gestion de mission autonome et un planificateur de trajectoire 2D adaptatif pour naviguer entre les conducteurs.
Lire l'article scientifique paru dans Canadian Science Publishing
Lire l'article scientifique paru dans Research Gate
Découvrez-en plus sur le projet en consultant la page Web du post-doctorant Louis Petit
Inspection de mines souterraines inaccessibles
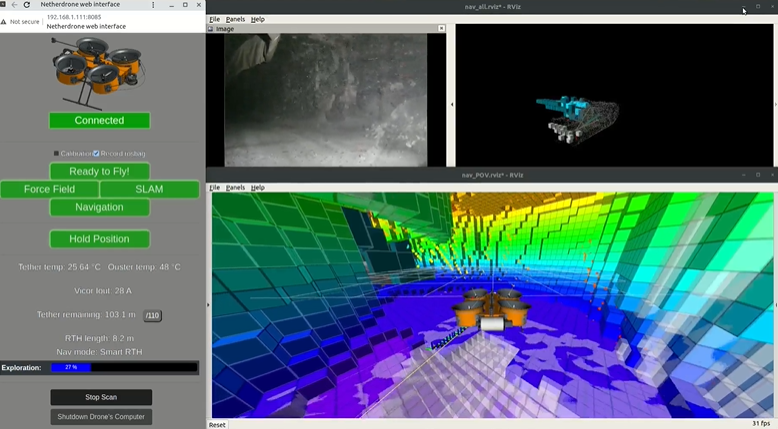
Photo : Fournie
La cartographie des chantiers souterrains est cruciale pour évaluer la quantité de roche dynamitée et l’intégrité du site. Récemment, les drones équipés de lidar ont été utilisés pour cartographier les chantiers avec une plus grande précision et sans angles morts.
Cependant, ils ont des limites, comme une grande taille, le positionnement difficile du lidar sur le drone, le temps de vol limité pour les inspections visuelles détaillées et la communication souterraine peu fiable.L’équipe de projet a développé un drone compact avec liaison filaire appelé le NetherDrone, spécialement conçu pour les chantiers souterrains.
« Le NetherDrone utilise une propulsion carénée sur mesure pour augmenter l’efficacité de la poussée de 50 % afin de réduire la taille du drone tout en conservant des capacités de levage adéquates », explique Marc-Antoine Leclerc, étudiant au doctorat en génie mécanique. Le drone dispose d’une bobine à bord de 120 m pour la communication et l’alimentation en puissance, ainsi qu’un bras rotatif pour déployer le câble de toutes les directions et réduire les perturbations du câble en lacet.
Lire l'article scientifique paru dans Canadian Science Publishing
Échantillonnage de sols en agriculture

Photo : Fournie
L'échantillonnage du sol est utilisé en agriculture pour surveiller les champs et planifier l'application d'engrais. Cette tâche est généralement effectuée manuellement, mais des robots au sol ont récemment été introduits pour la réaliser.
Les robots terrestres étant souvent lents et lourds, ils ont le défaut d'accroître le compactage des sols. Les petits drones volant rapidement pourraient constituer une solution de rechange intéressante aux robots terrestres.
Cependant, les drones sont très limités en matière de charge utile et de forces qu’ils peuvent appliquer au sol. Ce projet a permis de développer le premier système aéroporté capable d'échantillonner des sols agricoles densément compactés.
Lire l'article scientifique publié dans Canadian Science Publishing
Des aéronefs comme solution de rechange aux hélicoptères

Photo : Fournie
Une équipe du professeur David Rancourt travaille sur de nouveaux concepts d’aéronefs pour des applications de travail aérien vertical pour remplacer les hélicoptères. « Ces concepts utilisent des avions à voilure fixe volant en cercle et attachés à une charge par l’intermédiaire de câbles, Maxime Doguet, étudiant au doctorat en génie mécanique. Ainsi, ils permettent de conserver la possibilité de lever la charge en stationnaire tout en utilisant l’efficacité des avions. »
Deux concepts sont présentement à l’étude : un premier utilisant deux avions permettant une stabilité naturelle de la charge, et un second utilisant un seul avion et un appareil de stabilisation monté sur la charge pour la maintenir fixe. Le premier a montré une efficacité trois fois supérieure à celle d’un hélicoptère dans la phase de vol stationnaire.
Conception d’un système d’audition embarqué pour drones

Photo : Fournie
L’interaction avec la voix pour contrôler un drone est un défi majeur en raison du bruit des hélices, qui vient masquer les sources sonores. Une interaction par la voix pourrait permettre, entre autres, de communiquer avec un opérateur distant, ou encore pour des missions de sauvetage où une personne en détresse peut tenter d’attirer l’attention du drone avec la voix.
Ce sujet de conception d'un système d'audition embarqué pour les drones fait l'objet du projet de François Proulx, étudiant au doctorat en génie électrique. Il y est proposé de développer un système d’audition robotique pour drone où une matrice de microphone peut être déployée et suspendue sous un drone à l’aide d’un treuil afin d’éloigner les microphones des hélices. De nouveaux algorithmes de localisation et de rehaussement de sources sonores sont également développés pour améliorer les performances lorsque la matrice de microphones oscille.
Ces projets vous inspirent?
Vous êtes passionnés par l'aéronautique sous toutes ses formes et souhaitez jumeler recherche, innovation et passion?
Joignez-vous à notre écosystème!
- Voir les offres de projets de recherche
- Consulter l'affichage - Professeure ou professeur en génie aéronautique